|
|
||
由歐盟資助的「SARTRE」(下稱路隊長計畫),在1月17日已經由VOLVO宣佈於瑞典成功完成首次路試,為改善高速公路塞車惡夢跨出一大步。所謂的路隊長計畫,是系統偵測所有高速公路上使用GPS的車,若發現規劃路徑相同者,系統就會發射訊號給這些車上的接收器,讓車輛自動排列成同一隊伍,所有車跟著系統指定的專業駕駛者前進,歐盟希望藉由這種全新技術,在未來改善高速公路塞車的狀況。
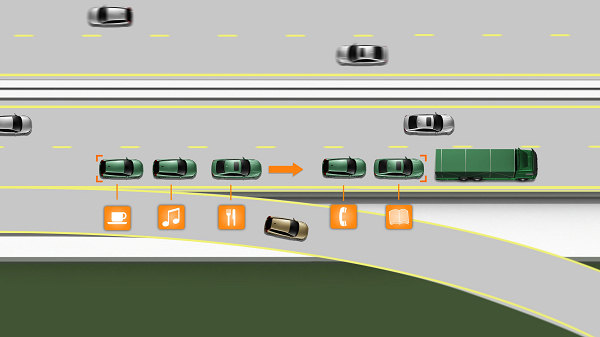 ▲系統會決定車輛在隊伍中的不同位置,會有怎樣的行車動態。
大約十年前,所謂的主動定速巡航系統概念開始出現,也就是車輛會自動判定前車距離而調整跟車速度,過程中駕駛人不需要踩煞車或油門;多年後,這套系統已實際落實於多家車廠的產品,也已引進台灣,譬如S60、7系列、S系列、A8等高級車,在國內都可選配類似的配備。而根據Auto Online實際路駕,也曾藉由這套系統在下班時段成功走完仰德大道,全程不踩煞車與油門,證明確實已達實用階段。
 ▲VOLVO在刻意在雪地上進行跟車測試,測試影像辨識系統是否受到環境干擾,不過現行配置在VOLVO S60上的CWFAB系統,利用影像辨識行人或車輛的能力,經Auto Online實際體驗發覺辨識能力及範圍仍未達完美。而基於這樣的系統,在歐盟贊助下,歐洲有多組跨國性的研究團隊,正合力開發更具前瞻性的系統「SARTRE」(Safe Road Trains for the Environmen),也就是我們所稱的路隊長計畫。這套系統能讓前往同一目的地的車輛自動排隊,即使中途有車要脫隊,後排隊伍會自動靠攏,若繼續有其他車加入車隊,系統也會自動讓車輛跟在後方。系統是透過衛星導航系統得知車輛所欲前往的目的地,也能和車上安裝的接收器雙向溝通,導引車輛前往跟車。
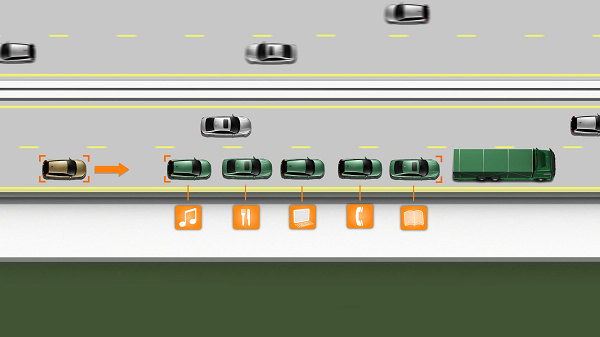 ▲當其中一部車離開隊伍,後方就會自動跟上。很明顯,路隊長計畫必須配合主動巡航系統和衛星導航系統的普及和統一,以及駕駛人的高度駕駛道德,如果計畫成功,歐盟認為這將能大幅提高高速公路的利用率,也因此能改善塞車的狀況,當然,就算塞車開起來也很輕鬆,也比較不會耗油。可喜的是,日前VOLVO已經讓路隊長計畫第一次成功完成路試,為未來的交通跨出一大步。
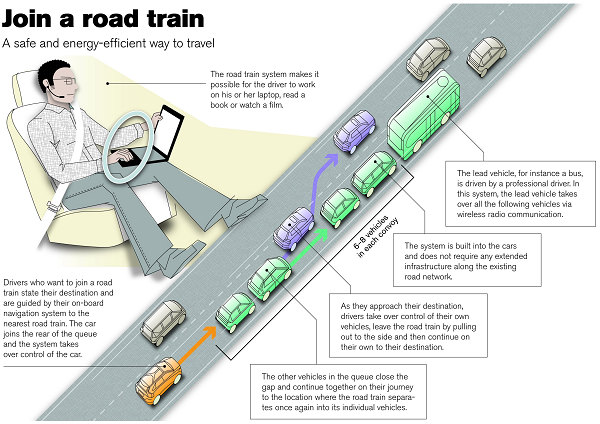 ▲車輛加入隊伍後,系統即接手車速、煞車與轉向,也會自動處理突發狀況,至於已經找到路隊長的車隊成員,則可放手交給系統掌控。根據系統的設想,每個前往同一目的地或使用同一規劃路徑的車隊,都會指定一部被認定具有專業駕駛資格的車來帶頭,通常是客運或職業駕駛,想要輕鬆跟車的人只需接受訊號要求加入車隊即可,系統便會帶領車輛加入車隊後方,以一列行進;由於加入系統必須擁有主動巡航系統,因此駕駛人設定後便不需要踩踏油門及煞車,跟車距離、車速、轉向都會由系統自動決定,VOLVO表示,駕駛人甚至能打開報紙、電腦或開始用餐,形同坐在私人包廂的火車上前進。
 ▲未來的高速公路上,這種駕駛人一邊看報一邊喝咖啡的景象,應該不會再被舉發上新聞,不少電視台的網路影片收集員可能會因此失業。這種看似遙不可及的夢想,在週邊科技逐漸成熟化之後,如今總算開始成型,即使研究者認為真正達到量產上市還需好幾年時間,不過在VOLVO路試成功後,已經令開發者大為振奮,特別是多套系統的整合是最困難的環節,如果能夠成功突破,科幻電影中的未來世界高速公路將可望出現。
 |
|
||||||||||