 |
||
還記得上次我們報導過的VOLVO SARTRE「路隊長計畫」嗎?這次它們真的讓它上路了!上次的測試階段,SARTRE只在特定的道路上進行,不過現在場景整個搬到西班牙的一般公路上,而且測試結果非常成功,看來未來汽車科技又再度向前邁開一大步。
 ▲SARTRE計畫首度進入開放道路測試階段,結果相當成功。簡稱為SARTRE的VOLVO環境安全道路列車(Safe Road Trains for the Environment)計畫,是將已應用於現有VOLVO車上的安全科技為基礎,透過雷達波、攝影機、雷射測距等技術,加以發揚光大的整合式進階技術;它的目標就是讓未來路上的汽車,在導航設定後可依據中央電腦選出使用相同路徑的專業駕駛擔任路隊長,讓其他車輛自動跟著走形成列車前進,藉此降低擁塞或事故的產生。系統藉由加入無線通訊技術,使用自主控制系統讓所有車輛都與前導車的速度及路徑一致,包括加速、煞車、轉向都全部由電腦自己處理,駕駛完全不必參與。
 ▲計畫主持人Linda Wahlstrom親駕上場,在西班牙的道路上表演邊開車邊玩平板電腦絕技。本次在西班牙巴塞隆納的公路測試中,包括XC60、V60、S60與一輛貨卡的車隊,在電腦控制下以時速85公里的速度自動跟著前方6公尺的路隊長前進,而這次週遭並沒有特別管制其他車輛的干擾,在超過200公里的測試里程中,車輛彼此維持5至15公尺的車距,可以說完全按照劇本進行。成功的測試結果當然讓團隊相當振奮,因為原本人們以為這種自動跟車的鏡頭只可能出現在《機械公敵》這類的科幻電影中,現在他們已經證明確實可行。
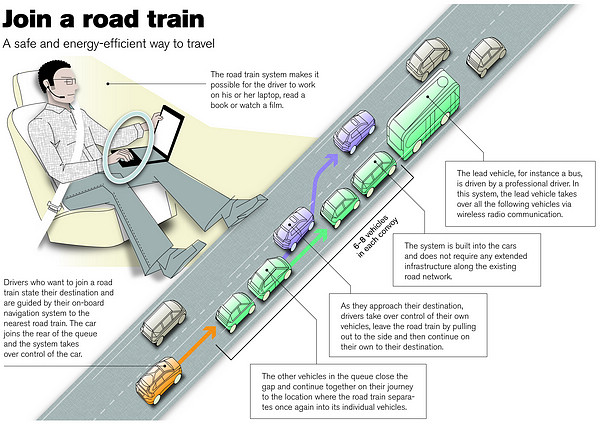 ▲透過嚴謹的車隊管理方式,由系統選出具有豐富經驗的前導車後,其他走相同路徑的車輛就可隨時加入跟隨,當然也能隨時退出離開。主動車距控制巡航系統在許多車廠早已配備,VOLVO的ACC或BMW的Active Cruise Control with Stop & Go function(汎德稱為“主動式定速系統含主動車距控制巡航功能”)就是一例,但SARTRE這套系統厲害的地方就在於駕駛者完全不須理會方向盤和煞車、油門控制,終極目標就是做到邊“開車”邊看報,而不像現在ACC必須自己控制方向盤,有些停車再開還須額外重新啟用系統。
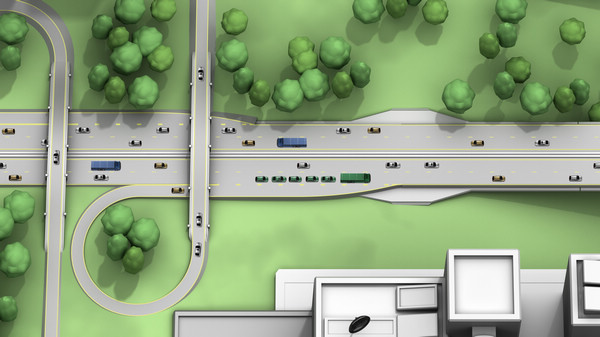 ▲這套系統除了具備降低追撞可能的優點,也能減少油耗浪費並加速車流,未來值得期待。其實SARTRE發展至今已經進入第三年了,累積的測試里程也超過1萬公里,不過這次真正在開放道路上測試成功,雖說讓整個計畫進入下一個階段,但並不意謂未來世界很快就會來到,根據該計畫主持人的說法,最少還需要十年的時間才可能真正開放運行。
|
|
||||||||||